
机械手臂 Robot

展品:机器手臂 EFORT
| 型号 | 生产年份 | 当时市价 |
|---|---|---|
| EFORT | 2013年 | /元 |
EFORT履历
自2022年9月荣退,位于工程文化认知园G1区,教学
机械手臂定义
机械手臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,手臂是机器人执行机构中重要的部件,作用是将被抓取的工件运送到给定的位置。机械手臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统。因其独特的操作灵活性,已在工业装配、安全防爆等领域得到广泛应用。
机器手臂结构
机械手臂由以下几部分组成:运动元件,导向装置,手臂等。手臂的结构、工作范围、灵活性、承载能力和定位精度都直接影响机器手臂的工作性能。
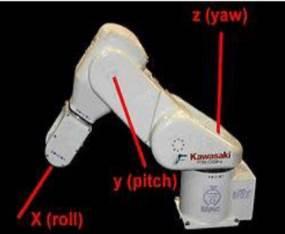
标准三轴关节型机械手
水平多关节机械手臂一般有三个主自由度,Z1转动,Z2转动,Z移动。通过在执行终端加装X转动,Y转动可以到达空间内的任何坐标点。
关节型机器人
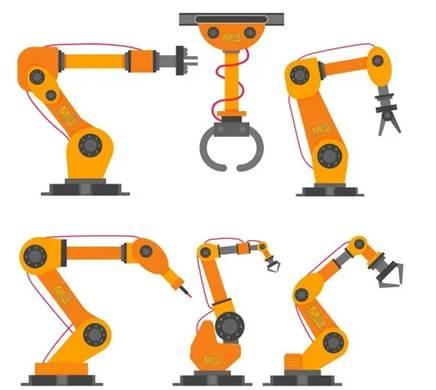
机器手臂分类
目前机器人多以机械手臂的型式为主,机械手臂以各种形状与大小而有所不同,常见的型式有线性手臂、SCARA手臂、关节多轴机械手臂等。对于工业应用来说,有时并不需要机械手臂具有完整的六个自由度,而只需其中的一个或几个自由度。
关节型机器人,是现今最主流的工业机器人类型,一般有六个关节轴,每个轴由回转和旋转的自由度构成。它是以模仿人手臂的结构:从下往上,以1-2轴构成下臂,而以3-6轴构成上臂。现在市场上各大厂家推出的工业机器人产品绝大多数都是这种类型,关节型机器人的作业范围大、动作灵活,应用十分广泛。

ABB工业机器人
SCARA机器人,主要用于物料搬运和组装应用,一般有四个关节轴,由三个旋转轴和一个上下移动的关节轴组成。具有动作灵活、结构简单、速度快、定位精度高的特点。

SCARA机器人
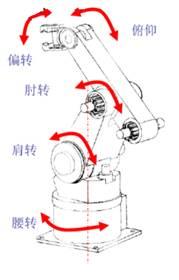
机器手臂的运动形式
一般机器手臂有3个自由度,即手臂的伸缩、左右回转和生姜(或俯仰)运动。手臂回转和升降运动是通过基座的立柱实现的,立柱的横向移动即为手臂的横移。手臂的各种运动通常由驱动机构和各种传动机构来实现,不仅承受被抓取工件的重量,还承受末端执行器、手臂和手腕自身的重量。
机械手臂的运动形式
机器手臂发展史
1921年捷克科幻作家卡雷尔•恰佩克的《罗素姆的万能机器人》中最早出现名为Robota的机器人。1954年乔治·迪沃申请了第一个机器人的专利,1956年约瑟夫•恩格伯格基于迪沃的专利,发明了第一台专门应用于产业生产的机械手臂。
1963年日本不二输送机工业株式会社制造出专门使用在栈板专用的搬运工具。1973年德国库卡机器人集团研发出第一台采用机电驱动的6轴机械手臂。

六轴式机械手臂
机械手臂在产业自动化的应用相当广泛,主要使用在人工无法进行或者会耗费较多时间来做的工作,机械手臂在精度与耐用性上可以减少人为的不可预知的问题。
机械手臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影。尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业。

物流领域机械手臂

电子电气用机械手臂

汽车工业用机械手臂

太空站移动维修系统机械手臂

工业机器人发展史
工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。
现代机器人的研究始于20世纪中期,其技术背景是计算机和自动化的发展,以及原子能的开发利用。大批量生产的迫切需求推动了自动化技术的进展,其结果之一便是1952年数控机床的诞生。与数控机床相关的控制、机械零件的研究又为机器人的开发奠定了基础。
另一方面,原子能实验室的恶劣环境要求某些操作机械代替人处理放射性物质。在这一需求背景下,美国原子能委员会的阿尔贡研究所于1947年开发了遥控机械手,1948年又开发了机械式的主从机械手。

ABB工业机器人
1954年美国戴沃尔最早提出了工业机器人的概念,并申请了专利。该专利的要点是借助伺服技术控制机器人的关节,利用人手对机器人进行动作示教,机器人能实现动作的记录和再现。现有的机器人差不多都采用这种控制方式。
1965年,MIT的Roborts演示了第一个具有视觉传感器的、能识别与定位简单积木的机器人系统。1980年工业机器人才真正在日本普及,故称该年为“机器人元年”。德国工业机器人的数量占世界第三,仅次于日本和美国,其智能机器人的研究和应用在世界上处于领先地位。
我国工业机器人起步于20世纪70年代初,其发展过程大致可分为三个阶段:70年代的萌芽期;80年代的开发期;90年代的实用化期。经过多年发展现已初具规模。目前我国已生产出部分机器人关键元器件,开发出弧焊、点焊、码垛、装配、搬运、注塑、冲压、喷漆等工业机器人。部分关键技术已达到或接近世界水平。
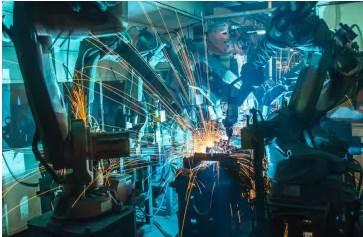
机器人焊接

机器人喷涂
机器手臂奇奇怪怪的问题
问:为什么说机械手臂是工业机器人?
答:美国机器人协会(RIA)的定义:“工业机器人是用来进行搬运材料、零件、工具火专用装置的,通过可编程的动作来执行各种任务的,具有编程能力的多功能机械手。”
问:什么叫“示教再现机器人”?
答:1954年美国戴沃尔最早提出了工业机器人的概念,并申请了专利。该专利的要点是借助伺服技术控制机器人的关节,利用人手对机器人进行动作示教,机器人能实现动作的记录和再现。这就是所谓的示教再现机器人。现有的机器人差不多都采用这种控制方式。
问:机器人有多少种手?
答:机器人的大多数机械式夹持机构为双指头爪式,根据手指运动方式的可分为:回转型、平移型;夹持方式的不同又可分成内撑式与外夹式;根据结构特性可分为气动式、电动式、液压式及其组合夹持机构。
问:何为功能工业机器人的四大家族?
答:即ABB、KUKA、FANUC、YASKAWA。
问:机器人Robot的来源?
答:机器人(Robot)衍生自捷克语Robota。Robota最早出现于1920年捷克剧作家卡雷尔·恰佩克(Karel Capek)的剧本《罗萨姆的万能机器人》,意思是“苦力”。然后逐渐演变为机器人Robot。
问:什么是“机器人学三原则”?
答:机器人学(Robotics)则来源于艾萨克·阿西莫夫(Isaac Asimov)的《我,机器人》。艾萨克·阿西莫夫是美国科幻小说的代表人物之一,主要作品有《基地系列》、《银河帝国三部曲》和《机器人系列》。
他提出了机器人学三原则:
原则1:机器人不能伤害人类,或因其不作为而使人类收到伤害。
原则2:机器人必须执行人类的命令,除非命令与上述原则抵触。
原则3:不违背上述原则的前提下,机器人应保护自身不受伤害。
1985年,艾萨克·阿西莫夫在《机器人系列》的最后作品《Robots and Empire》又补充了凌驾于“机器人学三原则”之上的原则0,即机器人必须保护人类的整体利益不受伤害,其他三条原都必须在这一前提下才能成立。
上海大学工程训练中心
上海大学工程训练中心为全学校人才培养提供支持保障上海大学工程训练中心@版权所有
快速入口
常用链接
关注我们


